

Product System
- Intelligent Equipment

- Digital Mine
- Intelligent Mineral Processing
- Other Products

Engineering Services
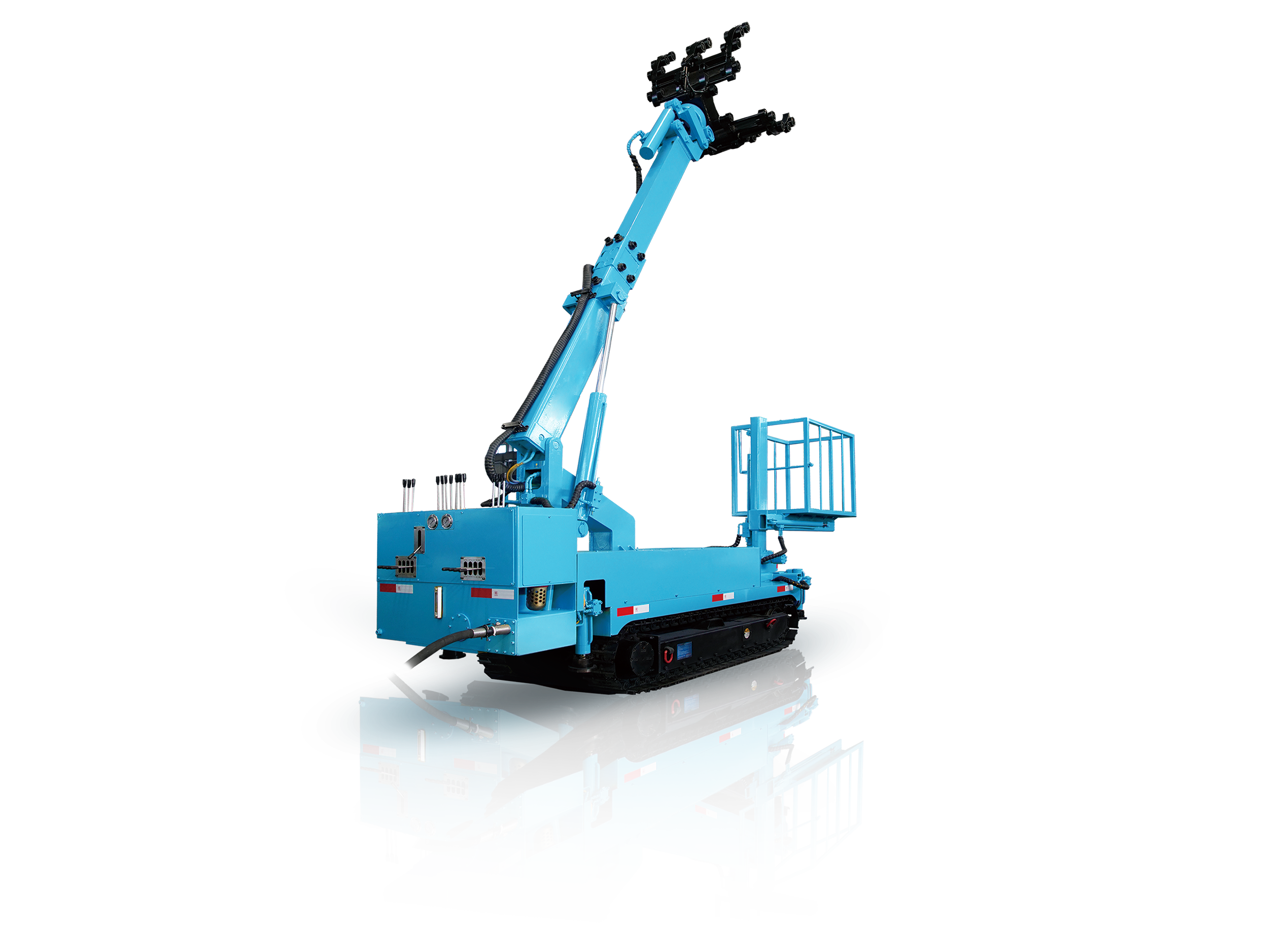
The Mine Pneumatic Pipeline Auxiliary Installation Robot is an intelligent pipeline installation equipment specially designed for complex roadway environments in underground coal mines.
Item | Unit | CGQZ3/5.8Y | CGQZ3/5.8 | CGQZ2/5.8Y | CGQZ2/5.8 | CGQZ1/5.8Y | CGQZ1/5.8 | |||
CM | Rated Pressure of Gripping Mechanism | MPa | 12 | |||||||
Maximum Gripping Pipeline Diameter | 皿 | 950±20 | ||||||||
Minimum Gripping Pipeline Diameter | m | 100±20 | ||||||||
Maximum Gripping Height | 皿 | 5800 | ||||||||
Maximum Gripping Width | 皿 | 6600 | ||||||||
Maximum Gripping Pipeline Weight | kg | ≥3000 | ≥2000 | ≥1000 | ||||||
Slewing Angle | (.) | 360 | ||||||||
Overall Dimensions (L×W×H) | mm | 4850×1100×2000(土50) | ||||||||
Machine Weight | kg | 4500 | ||||||||
Ground Contact Pressure | MPa | ≤0.14 | ||||||||
Ground Clearance | mm | 200 | ||||||||
Noise | Sound Pressure Level | dB(A) | 95 | |||||||
Sound Power Level | dB(A) | 112 | ||||||||
TM | Travel Mode | - | Crawler Type | |||||||
Brake Type | - | Fail-safe Type | ||||||||
Drive Mechanism Type | - | Hydraulic Motor | ||||||||
Travel Mechanism Features | - | Hydraulic Motor Driven by Pneumatic Motor,Crawler Type | ||||||||
Rated Pressure | MPa | 12 | ||||||||
Travel Speed | m/min | 25 | ||||||||
Climbing Capacity | (.) | ±20 | ||||||||
Track Shoe Width | mm | 230 | ||||||||
LM | Working Pressure | MPa | 12 | |||||||
Maximum Lifting Height | In | 1930±50 | ||||||||
Minimum Lowering Height | In | 1170±50 | ||||||||
Platform Lifting Height | In | 760±50 | ||||||||
Platform Dimensions (L×W) | Bn | 1280×780(±50) | ||||||||
Maximum Load Capacity | kg | 500 | ||||||||
HYD | Rated Pressure | MPa | 13 | |||||||
PS | Rated Flow | L/min | 45 | |||||||
Pneumatic Motor | Rated Working Pressure | MPa | 0.50 | |||||||
Air Consumption | m³/mi | 6 | ||||||||
Rated Power | kW | 8 | ||||||||
Oil Pump | Type | - | Piston Pump | |||||||
Rated Pressure | MPa | 13 | ||||||||
Displacement | nl/r | 32 | ||||||||
Oil Tank Capacity | L | 75 | ||||||||
Remote Control Distance | m | 240 | - | 240 | - | 240 | - | |||



