

Product System
- Intelligent Equipment

- Digital Mine
- Intelligent Mineral Processing
- Other Products

Engineering Services
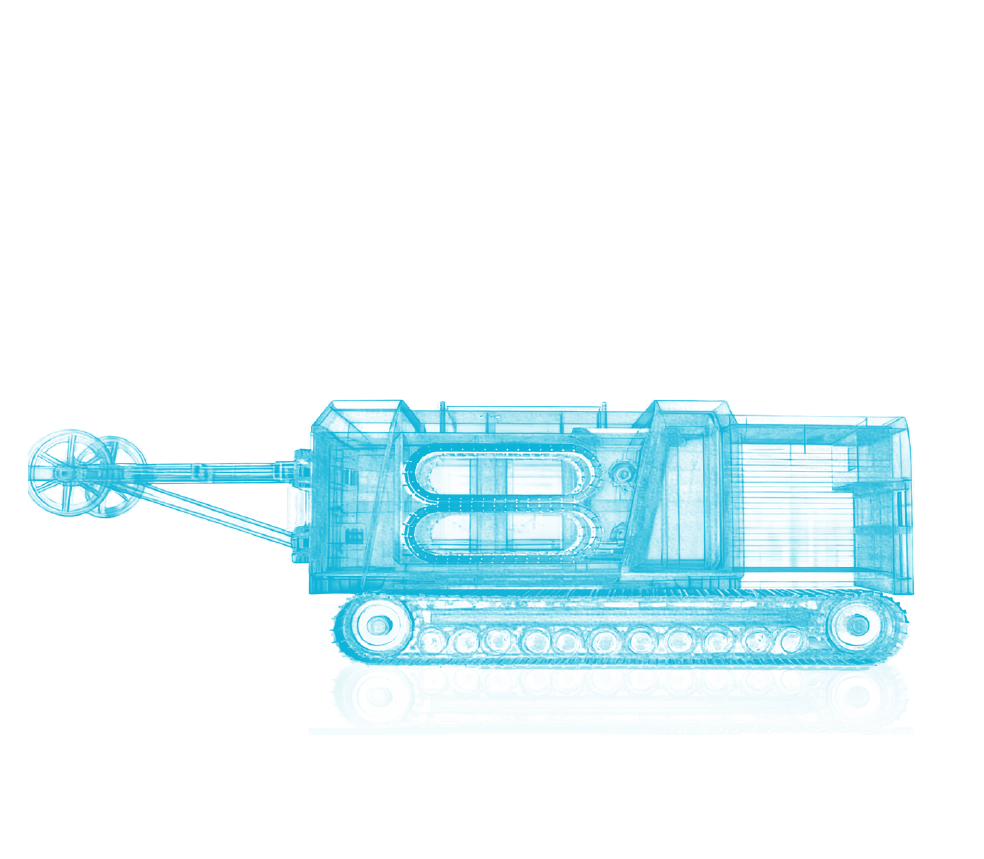
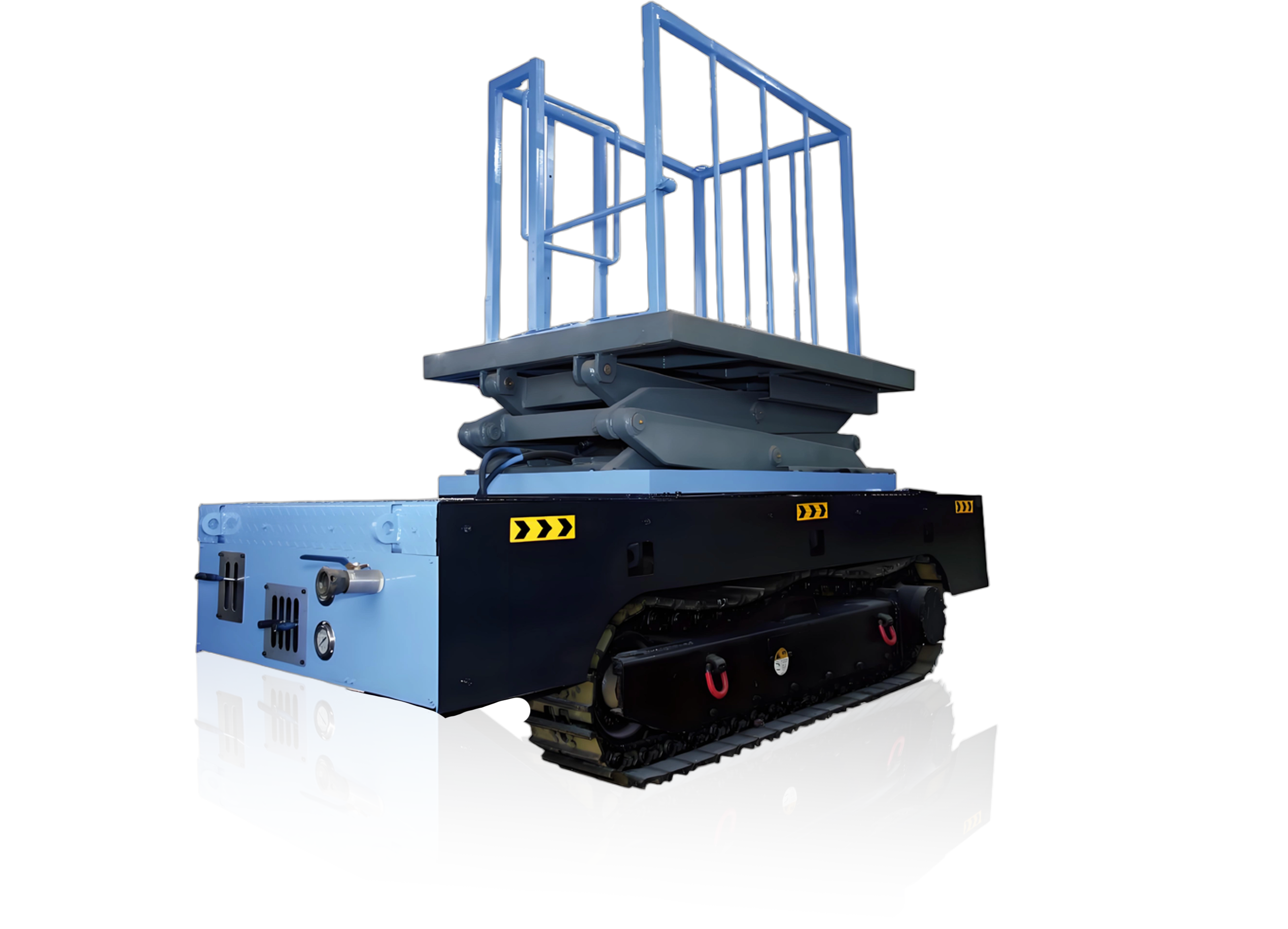
气动履带平板登高机器人是一款专为煤矿井下高空安装、检修作业设计的人举升平台。以井下压风为动力,采用履带行走和液压升降机构,能将作业人员和工具安全、平稳地举升至最大4.5米高度,有效解决巷道顶部设备安装、维护难题,是架空乘人装置、照明系统、管路电缆安装的理想装备。
| 项目 | 项目 | 单位 | 单位 | 参数 |
| 额定载重量 | kg | 500 | ||
| 牵引力 | KN | 10 | ||
| 外形尺寸(长x宽x高) | mm | 2950x1100x1200(50) | ||
| 机重 | kg | 2500 | ||
| 接地比压 | MPa | 0.045 | ||
| 离地间隙 | mm | 200 | ||
| 嗓音 | 声压级 | dB(A) | 95 | |
| 嗓音 | 声功率级 | dB(A) | 112 | |
| 升降机构 | 最大工作高度 | mm | 330±20 | |
| 升降机构 | 平台升降高度 | mm | 210±20 | |
| 升降机构 | 平台升降速度 | m/s | 0.4 | |
| 行走机构 | 行走方式 | - | 履带式 | |
| 行走机构 | 制动型式 | - | 失效制动型 | |
| 行走机构 | 驱动机构类型 | - | 液压马达 | |
| 行走机构 | 行走机构特征 | - | 气马达驱动液压马达 | |
| 行走机构 | 额定压力 | MPa | 10 | |
| 行走机构 | 行走速度 | m/min | 30 | |
| 行走机构 | 空载时爬坡能力 | (。) | ±20 | |
| 行走机构 | 履带板宽度 | mn | 230 | |
| 液压泵站 | 额定压力 | MPa | 11 | |
| 额定流量 | L/min | 55 | ||
| 气马达 | 额定工作气压 | MPa | 0.50 | |
| 气马达 | 耗气量 | m3/min | 8 | |
| 气马达 | 额定功率 | kW | 7.0 | |
| 柱塞泵 | 类型 | - | 齿轮油泵 | |
| 柱塞泵 | 额定压力 | MPa | 20 | |
| 柱塞泵 | 排量 | ml/r | 40 | |
| 液压泵站 | 油箱容量 | L | 50 |
项目 | 单位 | 参数 | ||
额定载重量 | kg | 500 | ||
牵引力 | kN | 10 | ||
外形尺寸(长×宽×高) | mm | 2950×1100×1200(±50) | ||
机重 | kg | 2500 | ||
接地比压 | MPa | 0.045 | ||
离地间隙 | mm | 200 | ||
噪声 | 声压级 | dB(A) | 95 | |
声功率级 | dB(A) | 112 | ||
升降机构 | 最大工作高度 | mm | 3300±20 | |
平台升降高度 | mm | 2100±20 | ||
平台升降速度 | m/s | 0.4 | ||
行走机构 | 行走方式 | 一 | 履带式 | |
制动型式 | 一 | 失效制动型 | ||
驱动机构类型 | 一 | 液压马达 | ||
行走机构特征 | 一 | 气马达驱动液压马达 | ||
额定压力 | MPa | 10 | ||
行走速度 | m/min | 30 | ||
空载时爬坡能力 | () | ±20 | ||
履带板宽度 | mm | 230 | ||
液压泵站 | 额定压力 | MPa | 11 | |
额定流量 | L/min | 55 | ||
气马达 | 额定工作气压 | MPa | 0.50 | |
耗气量 | m³/min | 8 | ||
额定功率 | kW | 7.0 | ||
柱塞泵 | 类型 | 一 | 齿轮油泵 | |
额定压力 | MPa | 20 | ||
排量 | ml/r | 40 | ||
油箱容量 | L | 50 | ||



